


Flysky Noble NB4 Gyro Receiver 4 Channels INr4 GYB, for Flysky NB4, Noble Lite, Noble Pro Radio Transmitter AFHDS 3
Flysky RC Gyro Receiver INr4-GYB for Noble NB4, Noble Pro, Noble Lite Radio Controllers
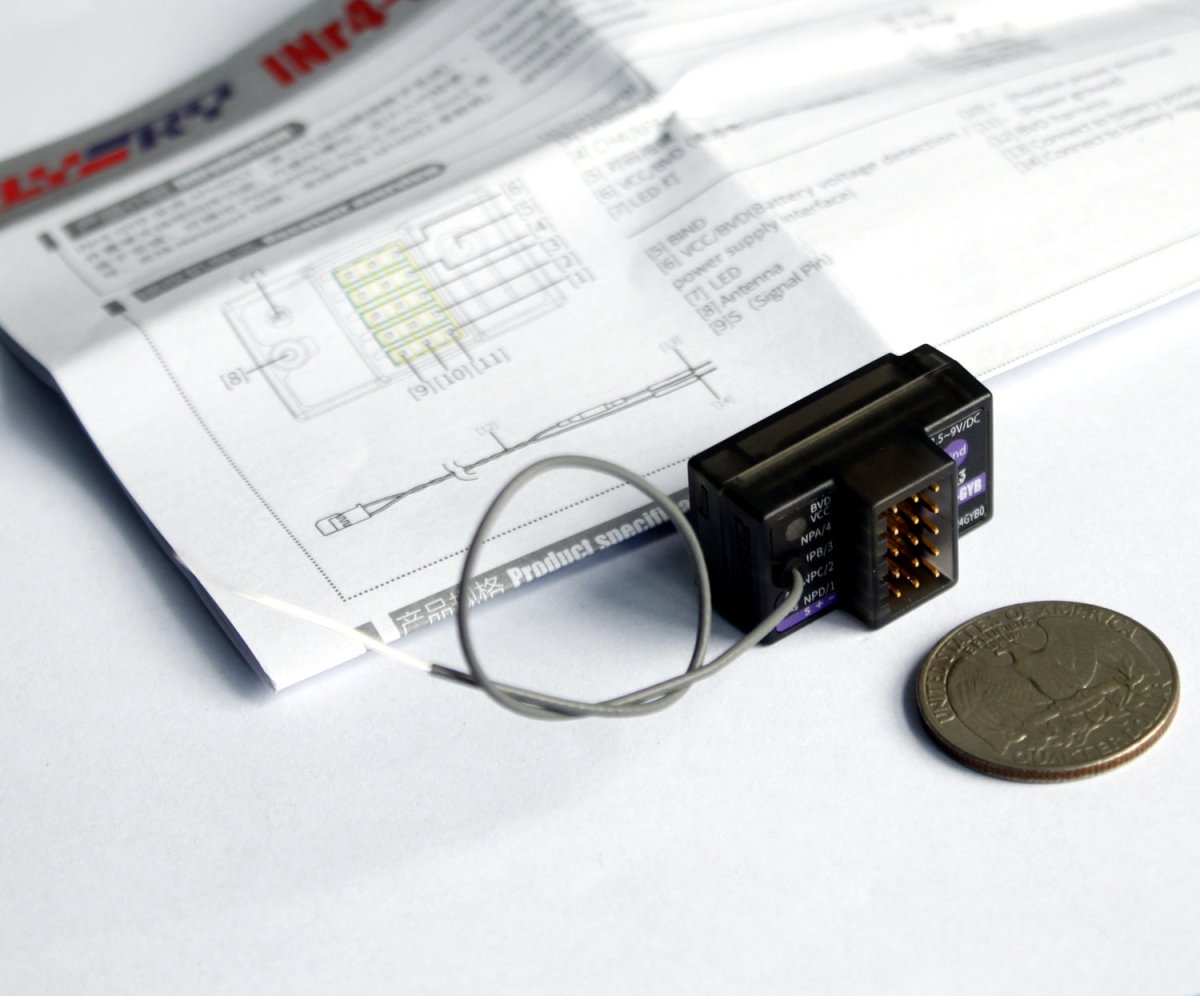
Adaptive transmitter: all transmitter supporting AFHDS3 (NB4,NB4 Lite, etc.). The INr4-GYB receiver adopts Flysky's third-generation automatic frequency hopping digital system (AFHDS 3).It uses a single-antenna bidirectional transmission system ,with built-in gyroscope and is uniquely designed to install and output PWM/PPM/i-bus/S.BUS/i-bus2 in signals. It supports all AFHDS3 transmitter .
Specification:
| Application: | Rc Car / Boat |
| Compatible Model: | Noble NB4 / Noble Pro |
| PWM Channels: | 4 |
| RF: | 2.4GHz ISM |
| 2.4G Protocol: | AFHDS 3 |
| Antenna: | Single Antenna |
| Input Power: | 3.5~ 9V |
| Data Output: | PWM/PPM/i-bus/S.BUS/i-bus2 |
| Online Update: | Yes |
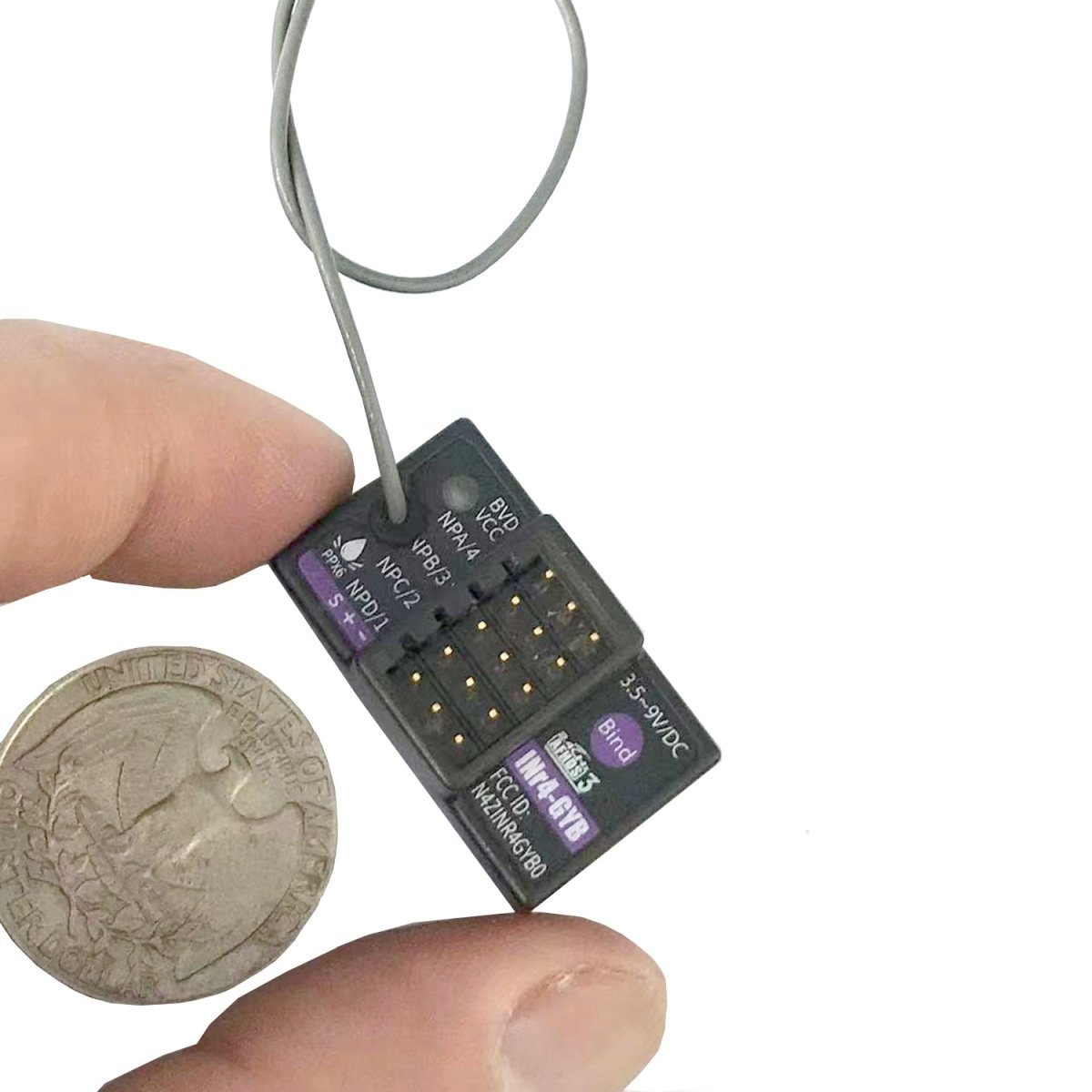
| Dimensions: | 17*29*16. 6 mm |
| Weight: | 6.5g |
| Certification: | CE,FCC ID:N4ZINR4GYB0 |
Binding Flysky INr4-GYB Gyro Receiver with Flysky Noble NB4, Noble Pro, Noble Lite Rc Transmitter
Binding:
1. Press and hold the receiver BIND button [5] while powering on the receiver ,release the BIND button after receiver is powered on or
powering on the receiver first, press and hold the BIND button 3 seconds , the LED [7] on the receiver will flash rapidly;
2. Put the transmitter into bind mode;
3. The binding process is complete when the LED on the receiver stops flashing and is on continuously.
If a transmitter that has had its radio frequency (RF Standard) set to “AFHDS3 1 way” (please refer to your transmitter user manual)enters bind mode, the receiver LED will instead flash slowly. Exit bind mode on the transmitter and if the receiver LED stops flashing and is on continuously, the binding process is complete.
4. Check to make sure the transmitter and receiver functions are working correctly, repeat steps 1 to 3 (binding process) if any problems arise.
SVC Setting(NB4 interface)
The SVC function relies on the gyroscope to perform custom deviation correction on the direction of the vehicle's movement, helping the vehicle to have a better driving state. The specific settings are as follows:
1. Enter into NB4 SVC Function interface.
2. Click the Inactive icon to Active at the bottom of the interface to turn this function on or off;
3. Click "Neutral Calibration" to access the calibration animation interface;
• "Neutral calibration" is used to calibrate the direction and throttle median with the gyroscope, enabling the vehicle to get into the best state when driving normally. Before turning on the smart vehicle control function, it is necessary to fine-tune the steering gear quantity and median of the vehicle, and adjust the throttle median to the best driving state. After that, turn on the SVC to carry out median calibration. Every time the fine adjustment is changed, the median calibration will be carried out. During the median calibration, the handwheel and throttle should be set to their median positions and kept still before the calibration is completed;
4. Click "Reserve" to switch between "Normal/Reverse".it can set the gyroscope mixing direction channel;
5. Click "ESP Mode" to switch between "Normal/Lock";
• Normal: When the vehicle yaws or turns, the gyroscope automatically provides an opposite compensation according to the angular velocity generated to control the steering gear to keep it stable or prevent drifting;
• Lock: When the handwheel returns to and is kept at its median position, the gyroscope will control the steering gear in the opposite direction according to the yaw angle to make it return to the expected direction;
6. Click the "+/-" symbol settings displayed at the bottom of the "Steering Gain", "Throttle Gain" and "Priority" interfaces, and the setting values range from 0% to 100%;
• "Priority" is used to set the control ratio (turning radius) between handwheel control and gyroscope when the vehicle turns. When turning the vehicle with the handwheel, the steering angle will be reduced under the hybrid gyroscope control. When the value is 0%, the hybrid force is the largest, that is, the turning radius is the largest. When the value is 100%, the hybrid force is 0 and the turning radius is the smallest.
7. Gyroscope calibration is used to enable the gyroscope or change the gyroscope for the first time with the code. The model stays in a stable and static state, Click to calibrate and the receiver flashes 2 times and automatically exits, indicating that the calibration is successful.
Note: If you use a air transmitter such as PL18, it can only be used for basic purposes, and the SVC function cannot be realized.
Compatibility:
The INr4-GYB receiver is compatible with all AFHDS 3 surface transmitters
(Note: It is currently applicable to NB4 2.0.93 and NB4 lite 1.0.10 and later versions. The high-frequency library used by the firmware is version 3.0.)